NeuralMVS: Bridging Multi-View Stereo
and Novel View Synthesis
IJCNN 2022

Abstract
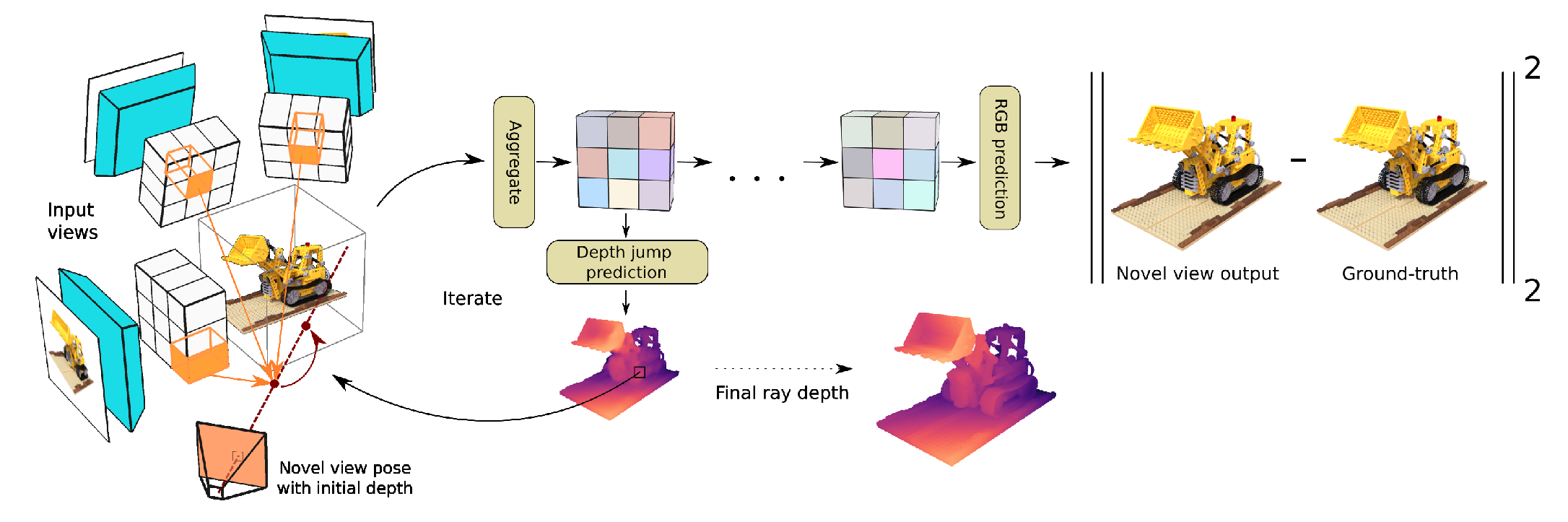
Multi-View Stereo (MVS) is a core task in 3D computer vision. With the surge of novel deep learning methods, learned MVS has surpassed the accuracy of classical approaches, but still relies on building a memory intensive dense cost volume. Novel View Synthesis (NVS) is a parallel line of research and has recently seen an increase in popularity with Neural Radiance Field (NeRF) models, which optimize a per scene radiance field. However, NeRF methods do not generalize to novel scenes and are slow to train and test. We propose to bridge the gap between these two methodologies with a novel network that can recover 3D scene geometry as a distance function, together with high-resolution color images. Our method uses only a sparse set of images as input and can generalize well to novel scenes. Additionally, we propose a coarse-to-fine sphere tracing approach in order to significantly increase speed. We show on various datasets that our method reaches comparable accuracy to per-scene optimized methods while being able to generalize and running significantly faster.
Video
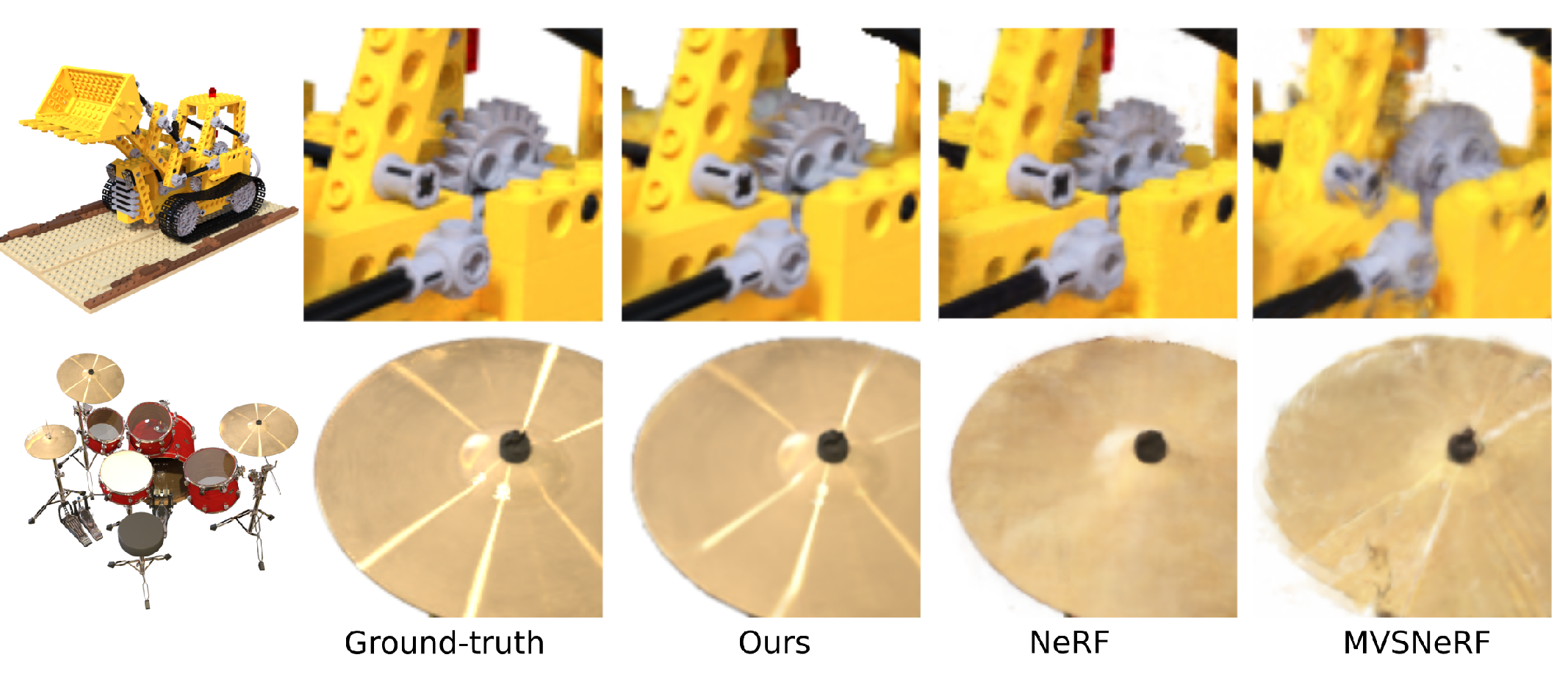
Comparison
Our image-based system uses features from selected input images to recreate a novel view. This allows the network to recover more details than NeRF or MVSNeRF especially in highly specular areas.
Citation
Acknowledgements
The website template was borrowed from Michaël Gharbi.